CS-466/566: Math for AI
Module 02: Computational Linear Algebra-2
Dr. Mahmoud Mahmoud
The University of Alabama
2026-03-23
TABLE OF CONTENTS
1. Introduction●
2. Matrix Multiplication○
3. Matrix Properties○
• What is the Determinant?
• What is a Matrix Inverse?
• What is Matrix Rank?
7. Change of Basis○
8. Solving Linear Systems○
What is a Matrix?
1. The “Data” Perspective (CS):
A matrix is just a 2D array (table) of numbers.
\[ X = \begin{bmatrix} \text{age} & \text{height} \\ 25 & 180 \\ 30 & 165 \\ 42 & 175 \end{bmatrix} \]
- Rows: Samples (people)
- Columns: Features (attributes)
2. The “Math” Perspective:
A matrix is a function or transformation.
- It acts on vectors: \(f(\mathbf{x}) = A\mathbf{x}\)
- It warps space (stretches, rotates, shears).
We will focus on the Math Perspective today.
Matrices as Basis Changers (1/2)
1. The Standard World (Identity)
\[ I = [\mathbf{e}_1 | \mathbf{e}_2] = \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} \]
A vector \(\mathbf{x} = (2, 2)\) means: \[ \mathbf{x} = 2\mathbf{e}_1 + 2\mathbf{e}_2 = 2\begin{bmatrix} 1 \\ 0 \end{bmatrix} + 2\begin{bmatrix} 0 \\ 1 \end{bmatrix} = \begin{bmatrix} 2 \\ 2 \end{bmatrix} \]
Result: You land exactly where you expect, at \((2,2)\).
Matrices as Basis Changers (2/2)
2. The Transformed World
\[ A = [\mathbf{v}_1 | \mathbf{v}_2] = \begin{bmatrix} 2 & 0 \\ 0 & 0.5 \end{bmatrix} \]
The same coordinates \((2, 2)\) now mean: \[ A\mathbf{x} = 2\mathbf{v}_1 + 2\mathbf{v}_2 = 2\begin{bmatrix} 2 \\ 0 \end{bmatrix} + 2\begin{bmatrix} 0 \\ 0.5 \end{bmatrix} \] \[ = \begin{bmatrix} 4 \\ 0 \end{bmatrix} + \begin{bmatrix} 0 \\ 1 \end{bmatrix} = \begin{bmatrix} 4 \\ 1 \end{bmatrix} \]
Result: The numbers (2,2) now land you at the physical location \((4, 1)\).
Matrix-Vector Multiplication is just a Linear Combination of Columns.
Matrix-Vector Multiplication: The Mechanics
The mechanics of matrix-vector multiplication can be visualized in two ways:
Column View
\[\begin{bmatrix} \color{red}{1} & \color{blue}{2} & \color{green}{3} \\ \color{red}{4} & \color{blue}{5} & \color{green}{6} \\ \color{red}{7} & \color{blue}{8} & \color{green}{9} \end{bmatrix} \begin{bmatrix} \color{red}{2} \\ \color{blue}{1} \\ \color{green}{0} \end{bmatrix}\]
\[= \color{red}{2}\begin{bmatrix} 1 \\ 4 \\ 7 \end{bmatrix} + \color{blue}{1}\begin{bmatrix} 2 \\ 5 \\ 8 \end{bmatrix} + \color{green}{0}\begin{bmatrix} 3 \\ 6 \\ 9 \end{bmatrix} = \begin{bmatrix} 4 \\ 13 \\ 22 \end{bmatrix}\]
Row View (Dot Products)
Row 1: \([1,2,3] \cdot [2,1,0] = 4\)
Row 2: \([4,5,6] \cdot [2,1,0] = 13\)
Row 3: \([7,8,9] \cdot [2,1,0] = 22\)
\[\Rightarrow \begin{bmatrix} 4 \\ 13 \\ 22 \end{bmatrix}\]
Both views give the same result — use whichever is more intuitive!
Types of Matrix Transformations
| Type | Matrix | Effect | Example: \(A \times (2,2)^T\) |
|---|---|---|---|
| Identity | \(\begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\) | No change | \(\begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\begin{pmatrix} 2 \\ 2 \end{pmatrix} = \begin{pmatrix} 2 \\ 2 \end{pmatrix}\) |
| Scaling | \(\begin{pmatrix} 2 & 0 \\ 0 & 3 \end{pmatrix}\) | Stretch | \(\begin{pmatrix} 2 & 0 \\ 0 & 3 \end{pmatrix}\begin{pmatrix} 2 \\ 2 \end{pmatrix} = \begin{pmatrix} 4 \\ 6 \end{pmatrix}\) |
| Shear | \(\begin{pmatrix} 1 & 1 \\ 0 & 1 \end{pmatrix}\) | Slant | \(\begin{pmatrix} 1 & 1 \\ 0 & 1 \end{pmatrix}\begin{pmatrix} 2 \\ 2 \end{pmatrix} = \begin{pmatrix} 4 \\ 2 \end{pmatrix}\) |
| Reflection | \(\begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix}\) | Flip | \(\begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix}\begin{pmatrix} 2 \\ 2 \end{pmatrix} = \begin{pmatrix} -2 \\ 2 \end{pmatrix}\) |
| Rotation 90° | \(\begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}\) | Rotate | \(\begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix}\begin{pmatrix} 2 \\ 2 \end{pmatrix} = \begin{pmatrix} -2 \\ 2 \end{pmatrix}\) |
Combining transformations: \(C = BA\) applies \(A\) first, then \(B\)
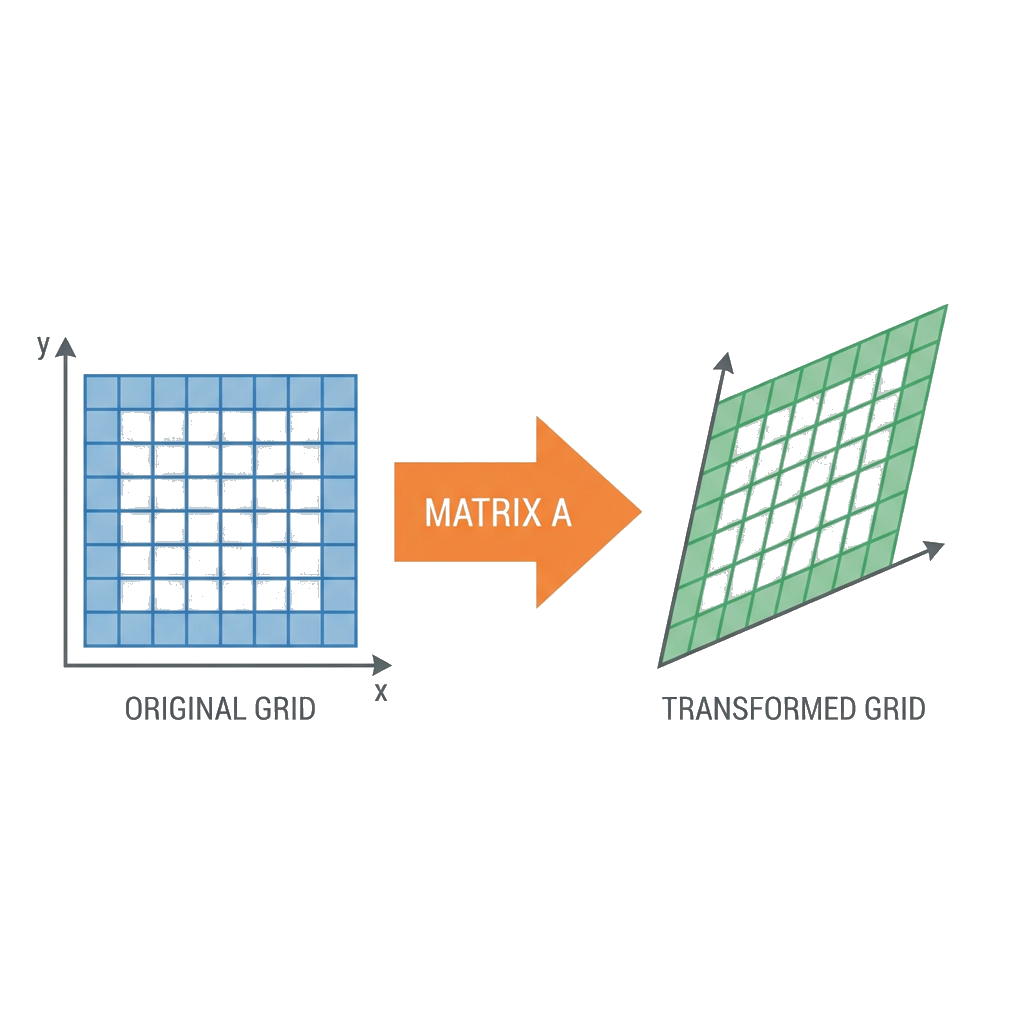
Matrix Columns = Transformed Basis Vectors
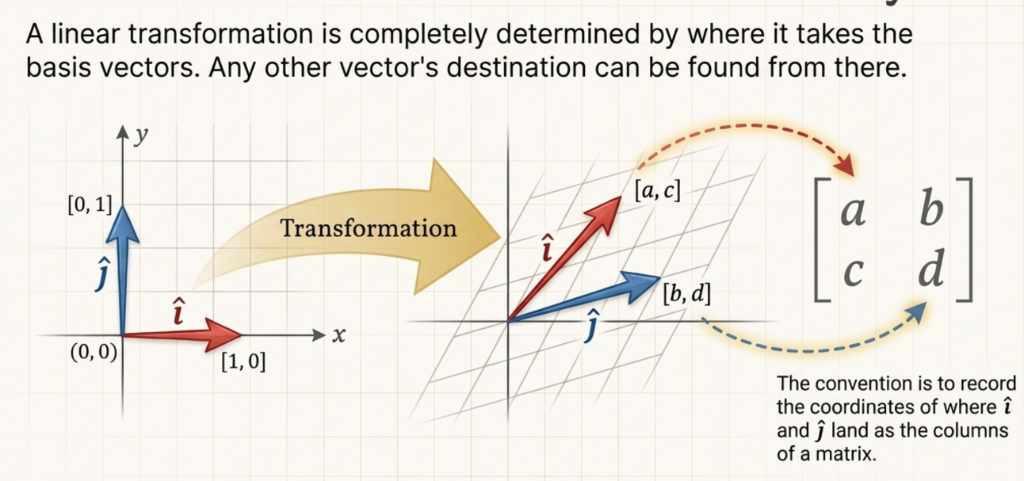
The columns of a matrix tell you where \(\hat{i}\) and \(\hat{j}\) land!
Matrix Transformations in Action
Matrix columns show where basis vectors \(\hat{i}\) and \(\hat{j}\) land after the transformation!
TABLE OF CONTENTS
1. Introduction✓
2. Matrix Multiplication●
3. Matrix Properties○
• What is the Determinant?
• What is a Matrix Inverse?
• What is Matrix Rank?
7. Change of Basis○
8. Solving Linear Systems○
What is Matrix Multiplication?
\(A\) acts on each column of \(B\) to produce each column of \(C\)
\[ A \cdot B = A \cdot \begin{bmatrix} \mathbf{b}_1 & \mathbf{b}_2 & \cdots & \mathbf{b}_n \end{bmatrix} = \begin{bmatrix} A\mathbf{b}_1 & A\mathbf{b}_2 & \cdots & A\mathbf{b}_n \end{bmatrix} = C \]
Example: \[ \begin{pmatrix} 2 & 0 \\ 0 & 3 \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} = \begin{pmatrix} A \cdot \begin{pmatrix} 1 \\ 0 \end{pmatrix} & A \cdot \begin{pmatrix} 0 \\ 1 \end{pmatrix} \end{pmatrix} = \begin{pmatrix} 2 & 0 \\ 0 & 3 \end{pmatrix} \] Each column of the identity is transformed by the scaling matrix!
Matrix multiplication = applying the left matrix to each column of the right matrix.
Matrix Multiplication: The Mechanics
Computing \((AB)_{ij}\):
\[c_{ij} = \sum_{k=1}^{n} a_{ik} \cdot b_{kj}\]
Steps:
- Take row \(i\) from \(A\)
- Take column \(j\) from \(B\)
- Dot product → element \((i,j)\) of \(C\)
Dimension rule: \[(m \times n) \cdot (n \times p) = (m \times p)\]
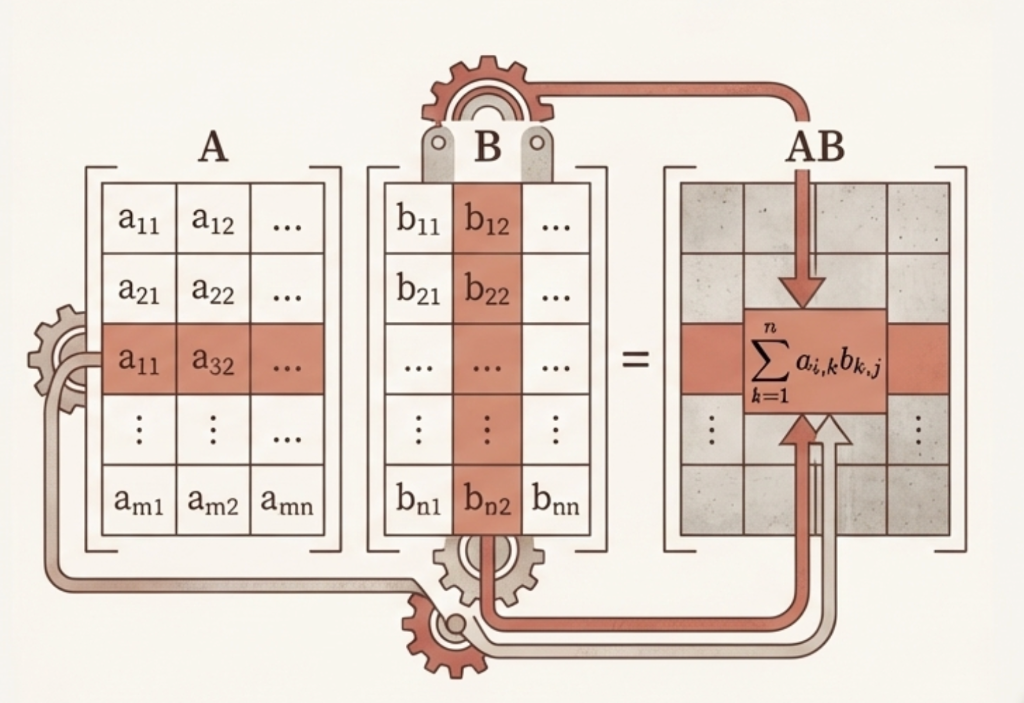
Row of \(A\) meets Column of \(B\) → one element of \(AB\)
Exercise: Matrix Multiplication
Calculate \(C = A \times B\):\[ \underbrace{\begin{bmatrix} 1 & 2 & 1 \\ 0 & 1 & 0 \end{bmatrix}}_{2 \times 3} \times \underbrace{\begin{bmatrix} 1 & 0 \\ 0 & 1 \\ 1 & 2 \end{bmatrix}}_{3 \times 2} \]
Answer: \(2 \times 2\)
(Inner dimensions 3 match; Outer dimensions \(2 \times 2\) remain)
Answer: \[ \begin{bmatrix} 2 & 4 \\ 0 & 1 \end{bmatrix} \]
Matrix Multiplication: Function Composition - Order Matters
Scale then Rotate (left): \(RS = \underbrace{\begin{pmatrix} 0.7 & -0.7 \\ 0.7 & 0.7 \end{pmatrix}}_{R} \underbrace{\begin{pmatrix} 2 & 0 \\ 0 & 0.5 \end{pmatrix}}_{S} = \begin{pmatrix} 1.4 & -0.35 \\ 1.4 & 0.35 \end{pmatrix}\)
Rotate then Scale (right): \(SR = \underbrace{\begin{pmatrix} 2 & 0 \\ 0 & 0.5 \end{pmatrix}}_{S} \underbrace{\begin{pmatrix} 0.7 & -0.7 \\ 0.7 & 0.7 \end{pmatrix}}_{R} = \begin{pmatrix} 1.4 & -1.4 \\ 0.35 & 0.35 \end{pmatrix}\)
Machine Learning Connection: Neural Networks
![]()
In Deep Learning, each layer of a Neural Network is just a matrix multiplication (plus a non-linearity).
- The matrix warps the space (shears, rotates, stretches).
- The goal? Transform “tangled” data into a space where it is linearly separable (easy to classify).
TABLE OF CONTENTS
1. Introduction✓
2. Matrix Multiplication✓
3. Matrix Properties●
• What is the Determinant?
• What is a Matrix Inverse?
• What is Matrix Rank?
7. Change of Basis○
8. Solving Linear Systems○
What is the Determinant?
Watch how different transformations change the area of the unit square!
What is the Determinant?
The determinant measures how much a transformation scales area.
For a 2×2 matrix: \[\det\begin{pmatrix} a & b \\ c & d \end{pmatrix} = ad - bc\]
Geometric Meaning:
- Start with a unit square (area = 1)
- Apply matrix transformation
- New area = \(|\det(A)|\)
Quick Examples:
| Matrix | det | Area Factor |
|---|---|---|
| \(\begin{pmatrix} 2 & 0 \\ 0 & 3 \end{pmatrix}\) | 6 | 6× bigger |
| \(\begin{pmatrix} 1 & 1 \\ 0 & 1 \end{pmatrix}\) | 1 | Same area |
| \(\begin{pmatrix} 2 & 4 \\ 1 & 2 \end{pmatrix}\) | 0 | Collapsed! |
The determinant tells you how the transformation scales space!
What the Sign Tells Us
det > 0
✅ Orientation Preserved
The “handedness” stays the same (counterclockwise stays counterclockwise)
det < 0
🔄 Orientation Flipped
Like looking in a mirror — left becomes right
det = 0
💀 Space Collapsed
2D → 1D line (or point). Matrix is singular — no inverse!
det = 0 means the transformation loses information — you can’t undo it!
Computing Determinants in NumPy
import numpy as np
#> Define matrices
A = np.array([[2, 0],
[0, 3]]) # Scaling matrix
B = np.array([[1, 2],
[3, 4]]) # General matrix
C = np.array([[2, 4],
[1, 2]]) # Singular matrix (det = 0)
#> Compute determinants
print(f"det(A) = {np.linalg.det(A):.2f}") #> Expected: 6
print(f"det(B) = {np.linalg.det(B):.2f}") #> Expected: -2
print(f"det(C) = {np.linalg.det(C):.2f}") #> Expected: 0det(A) = 6.00
det(B) = -2.00
det(C) = 0.00Use np.linalg.det(A) to compute the determinant of any matrix!
Exercise: Determinants
Calculate the determinant of \(M = \begin{pmatrix} 3 & 2 \\ 1 & 4 \end{pmatrix}\).
Answer: 10
(\(3(4) - 2(1) = 12 - 2 = 10\))
Answer: Area scales by 10x
The unit square becomes a parallelogram with area 10.
Exercise: Determinant
Are the vectors \(\mathbf{v}_1 = \begin{pmatrix} 1 \\ 2 \end{pmatrix}\) and \(\mathbf{v}_2 = \begin{pmatrix} 2 \\ 4 \end{pmatrix}\) linearly independent? Use the determinant!
\(\det\begin{pmatrix} 1 & 2 \\ 2 & 4 \end{pmatrix} = 1(4) - 2(2) = 0\)
Linearly Dependent!
Since \(\det = 0\), the “area” is zero. The vectors lie on the same line (they are parallel).
What is a Matrix Inverse?
The inverse \(A^{-1}\) “undo” the transformation \(A\): \[A A^{-1} = A^{-1} A = I\]
Geometric Intuition
- Rotation: Rotate \(30^\circ\) \(\to\) Rotate \(-30^\circ\)
- Scaling: Scale by \(2\) \(\to\) Scale by \(0.5\)
- Shear: Shear right \(\to\) Shear left
2×2 Inverse Formula
\[A^{-1} = \frac{1}{\det(A)} \begin{pmatrix} d & -b \\ -c & a \end{pmatrix}\]
Swap \(a,d\) | Negate \(b,c\) | Divide by \(\det\)
The inverse only exists when \(\det(A) \neq 0\)!
Matrix Inverse: Example
Given: \[A = \begin{pmatrix} 3 & 1 \\ 2 & 4 \end{pmatrix}\]
Step 1: Calculate determinant \[\det(A) = 3 \times 4 - 1 \times 2 = 12 - 2 = 10\]
Step 2: Apply the formula (swap, negate, divide) \[A^{-1} = \frac{1}{10} \begin{pmatrix} 4 & -1 \\ -2 & 3 \end{pmatrix} = \begin{pmatrix} 0.4 & -0.1 \\ -0.2 & 0.3 \end{pmatrix}\]
Step 3: Verify: \(A \cdot A^{-1} = I\)
Always verify your inverse by checking that \(A \cdot A^{-1} = I\)!
Computing Inverses in NumPy
import numpy as np
#> Define a matrix
A = np.array([[3, 1],
[2, 4]])
#> Compute inverse
A_inv = np.linalg.inv(A)
print("\nA^(-1) =\n", A_inv)
#> Verify: A @ A_inv = I
print("\nA @ A^(-1) =\n", A @ A_inv)
A^(-1) =
[[ 0.4 -0.1]
[-0.2 0.3]]
A @ A^(-1) =
[[1. 0.]
[0. 1.]]Use np.linalg.inv(A) — but only if you really need the inverse!
What is Matrix Rank?
What is Matrix Rank?
The rank of a matrix is the number of linearly independent rows (or columns).
Intuitive View
Rank = “True Dimensionality”
- How many independent directions does the matrix span?
- A 3×3 matrix with rank 2 only spans a 2D plane
- Rank tells you the “effective size” of the transformation
Key Facts
- \(\text{rank}(A) \leq \min(m, n)\) for \(m \times n\) matrix
- Row rank = Column rank (always!)
- Full rank: \(\text{rank}(A) = \min(m, n)\)
Rank measures how much “information” a matrix truly contains!
Rank: The Geometric View
Rank = 2 (Full)
\[\begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix}\]
Maps 2D → 2D
✅ Spans the whole plane
Rank = 1 (Deficient)
\[\begin{pmatrix} 1 & 2 \\ 2 & 4 \end{pmatrix}\]
Maps 2D → 1D line
⚠️ Columns are parallel
Rank = 0
\[\begin{pmatrix} 0 & 0 \\ 0 & 0 \end{pmatrix}\]
Maps everything → origin
💀 No information preserved
Lower rank = Lost dimensions = Lost information!
Rank and Key Concepts
| Concept | Connection to Rank |
|---|---|
| Determinant | \(\det(A) \neq 0 \Leftrightarrow\) full rank (for square matrices) |
| Inverse | \(A^{-1}\) exists \(\Leftrightarrow\) full rank |
| Linear Independence | Columns are independent \(\Leftrightarrow\) full column rank |
| Null Space | \(\dim(\text{null}(A)) = n - \text{rank}(A)\) |
| Solutions to \(Ax = b\) | Unique solution \(\Leftrightarrow\) full rank |
The Rank-Nullity Theorem
\[\text{rank}(A) + \text{nullity}(A) = n\]
(# of independent columns) + (# of free variables) = (total # of columns)
Computing Rank in NumPy
import numpy as np
#> Full rank matrix (rank = 2)
A = np.array([[1, 2],
[3, 4]])
#> Rank-deficient matrix (rank = 1)
B = np.array([[1, 2],
[2, 4]]) # Row 2 = 2 × Row 1
#> Compute ranks
print(f"rank(A) = {np.linalg.matrix_rank(A)}") #> Expected: 2
print(f"rank(B) = {np.linalg.matrix_rank(B)}") #> Expected: 1
#> Verify with determinant
print(f"\ndet(A) = {np.linalg.det(A):.2f}") #> Non-zero (invertible)
print(f"det(B) = {np.linalg.det(B):.2f}") #> Zero (singular)rank(A) = 2
rank(B) = 1
det(A) = -2.00
det(B) = 0.00Use np.linalg.matrix_rank(A) to compute the rank of any matrix!
Exercise: Matrix Rank
Find the rank of \(M = \begin{pmatrix} 1 & 2 & 3 \\ 2 & 4 & 6 \\ 1 & 1 & 1 \end{pmatrix}\).
Row 2 = 2 × Row 1
Rows 1 and 2 are linearly dependent — we effectively have only 2 independent rows.
Answer: rank(M) = 2
Only 2 linearly independent rows (Row 1 and Row 3).
No!
A 3×3 matrix needs rank 3 to be invertible. Since rank(M) = 2 < 3, the matrix is singular.
TABLE OF CONTENTS
1. Introduction✓
2. Matrix Multiplication✓
3. Matrix Properties✓
• What is the Determinant?
• What is a Matrix Inverse?
• What is Matrix Rank?
7. Change of Basis●
8. Solving Linear Systems○
Change of Basis
Why Change Basis?
Different coordinate systems describe the same vector differently.
Example: A point at \((3, 2)\) in standard coordinates might be \((1, 1)\) in a rotated coordinate system!
Same point in space, different numbers to describe it!
Intuition: Translating Instructions
Think of coordinates as instructions to reach a point.
- Standard Basis (\(I\)): “Go 4 East, 3 North”.
- New Basis (\(B\)): “Go ? along vector \(\mathbf{b}_1\), ? along vector \(\mathbf{b}_2\)”.
To find the new instructions, we need to undo the shape change caused by \(B\).
Multiply by \(B^{-1}\) to “unwrap” the transformation!
The Change of Basis Formula
If \(B\) contains new basis vectors as columns:
To convert TO new basis: \[[\mathbf{v}]_{\text{new}} = B^{-1} [\mathbf{v}]_{\text{standard}}\]
To convert FROM new basis: \[[\mathbf{v}]_{\text{standard}} = B [\mathbf{v}]_{\text{new}}\]
Key Insight: \(B^{-1}\) converts TO the new basis, \(B\) converts FROM it.
The inverse of a basis matrix converts coordinates between systems!
Change of Basis: Example
Problem: Convert \(\mathbf{v} = \begin{pmatrix} 4 \\ 3 \end{pmatrix}\) to a stretched basis.
New basis: \(\mathbf{b}_1 = \begin{pmatrix} 2 \\ 0 \end{pmatrix}\), \(\mathbf{b}_2 = \begin{pmatrix} 0 \\ 1 \end{pmatrix}\)
Step 1: Build basis matrix \(B = \begin{pmatrix} 2 & 0 \\ 0 & 1 \end{pmatrix}\)
Step 2: Find inverse \(B^{-1} = \begin{pmatrix} 0.5 & 0 \\ 0 & 1 \end{pmatrix}\)
Step 3: Convert: \([\mathbf{v}]_{\text{new}} = B^{-1} \mathbf{v} = \begin{pmatrix} 2 \\ 3 \end{pmatrix}\)
Step 4: Verify: \(2\mathbf{b}_1 + 3\mathbf{b}_2 = 2\begin{pmatrix} 2 \\ 0 \end{pmatrix} + 3\begin{pmatrix} 0 \\ 1 \end{pmatrix} = \begin{pmatrix} 4 \\ 0 \end{pmatrix} + \begin{pmatrix} 0 \\ 3 \end{pmatrix} = \begin{pmatrix} 4 \\ 3 \end{pmatrix} = \mathbf{v}\) ✅
The point (4,3) in standard coords = (2,3) in the stretched basis!
Exercise: Change of Basis
Convert \(\mathbf{v} = \begin{pmatrix} 2 \\ 4 \end{pmatrix}\) to the basis \(\mathcal{B} = \left\{ \begin{pmatrix} 1 \\ 1 \end{pmatrix}, \begin{pmatrix} -1 \\ 1 \end{pmatrix} \right\}\).
1. Form the Basis Matrix \(B\):
Answer: \(B = \begin{pmatrix} 1 & -1 \\ 1 & 1 \end{pmatrix}\)
2. Find the Inverse \(B^{-1}\) (Hint: \(\det(B)=2\)):
Answer: \(B^{-1} = \frac{1}{2}\begin{pmatrix} 1 & 1 \\ -1 & 1 \end{pmatrix}\)
3. Compute New Coordinates \([\mathbf{v}]_{\text{new}} = B^{-1}\mathbf{v}\):
Answer: \(\begin{pmatrix} 3 \\ 1 \end{pmatrix}\)
4. Verify your answer:
Check: \(3\begin{pmatrix} 1 \\ 1 \end{pmatrix} + 1\begin{pmatrix} -1 \\ 1 \end{pmatrix} = \begin{pmatrix} 3 \\ 3 \end{pmatrix} + \begin{pmatrix} -1 \\ 1 \end{pmatrix} = \begin{pmatrix} 2 \\ 4 \end{pmatrix}\) ✅
TABLE OF CONTENTS
1. Introduction✓
2. Matrix Multiplication✓
3. Matrix Properties✓
• What is the Determinant?
• What is a Matrix Inverse?
• What is Matrix Rank?
7. Change of Basis✓
8. Solving Linear Systems●
What is a Linear System?
Find \(\mathbf{x}\) such that \(A\mathbf{x} = \mathbf{b}\)
System of Equations
\[\begin{cases} 2x + y = 5 \\ x + 3y = 7 \end{cases}\]
Matrix Form
\[\underbrace{\begin{pmatrix} 2 & 1 \\ 1 & 3 \end{pmatrix}}_{A} \underbrace{\begin{pmatrix} x \\ y \end{pmatrix}}_{\mathbf{x}} = \underbrace{\begin{pmatrix} 5 \\ 7 \end{pmatrix}}_{\mathbf{b}}\]
The Key Question
“What linear combination of columns of \(A\) gives us \(\mathbf{b}\)?”
\[x_1 \begin{pmatrix} 2 \\ 1 \end{pmatrix} + x_2 \begin{pmatrix} 1 \\ 3 \end{pmatrix} = \begin{pmatrix} 5 \\ 7 \end{pmatrix}\]
Determinant and Solutions
One Solution
✅ \(\det(A) \neq 0\)
\[ \begin{cases} x + y = 3 \\ x - y = 1 \end{cases} \]
Infinite Solutions
⚠️ \(\det(A) = 0\), consistent
\[ \begin{cases} x + y = 2 \\ 2x + 2y = 4 \end{cases} \]
No Solution
💀 \(\det(A) = 0\), inconsistent
\[ \begin{cases} x + y = 2 \\ x + y = 5 \end{cases} \]
Zero determinant means either no solution or infinite solutions.
Solving \(A\mathbf{x} = \mathbf{b}\): Two Methods
❌ Using the Inverse
\[\mathbf{x} = A^{-1}\mathbf{b}\]
Problems?
• Computing \(A^{-1}\) is expensive: \(O(n^3)\)
• Numerically unstable
• Only works for square, invertible \(A\)
✅ Direct Methods
Gaussian Elimination / LU Decomposition
Advantages?
• More efficient: same \(O(n^3)\) but smaller constant
• More stable numerically
• np.linalg.solve() uses this!
Never compute \(A^{-1}\) just to solve \(A\mathbf{x} = \mathbf{b}\)!
Gaussian Elimination: The Algorithm
Goal: Transform the system into an upper-triangular form (“Row Echelon Form”) so we can solve it easily from bottom to top.
%%{init: {'theme': 'base', 'themeVariables': { 'fontSize': '30px', 'fontFamily': 'sans-serif'}}}%%
graph TD
A[Augmented Matrix] -->|Forward Elimination| B[Upper Triangular];
B -->|Back Substitution| C[Solution];
style A fill:#e3f2fd,stroke:#2196f3,stroke-width:2px;
style B fill:#e8f5e9,stroke:#4caf50,stroke-width:2px;
style C fill:#fff3e0,stroke:#ff9800,stroke-width:2px;
Visualizing Row Operations
Solve for \(x, y\): \[ \begin{cases} 2x + y = 5 \\ 4x - y = 1 \end{cases} \implies \left[\begin{array}{cc|c} 2 & 1 & 5 \\ 4 & -1 & 1 \end{array}\right] \]
Step 1: Eliminate the \(4\) (make it \(0\)). Target Row 2. Operation: \(R_2 \leftarrow R_2 - 2R_1\).
\[ \left[\begin{array}{cc|c} 2 & 1 & 5 \\ 4 & -1 & 1 \end{array}\right] \xrightarrow{R_2 - 2R_1} \left[\begin{array}{cc|c} 2 & 1 & 5 \\ 0 & -3 & -9 \end{array}\right] \]
Now it’s Upper Triangular!
Back Substitution
From the triangular matrix: \[ \left[\begin{array}{cc|c} 2 & 1 & 5 \\ 0 & -3 & -9 \end{array}\right] \]
1. Solve bottom equation first: \[-3y = -9 \implies y = 3\]
2. Substitute into top equation: \[2x + y = 5 \implies 2x + 3 = 5 \implies 2x = 2 \implies x = 1\]
Solution: \(\mathbf{x,y} = (1, 3)\)
Gaussian Elimination: 3x3 System
\[ \begin{cases} x + y + z = 6 \\ 2x + 4y + 2z = 16 \\ -x + 5y - 4z = -3 \end{cases} \implies \left[\begin{array}{ccc|c} 1 & 1 & 1 & 6 \\ 2 & 4 & 2 & 16 \\ -1 & 5 & -4 & -3 \end{array}\right] \]
Step 1: Clear Column 1 (below pivot) \(R_2 \leftarrow R_2 - 2R_1, \quad R_3 \leftarrow R_3 + R_1\) \[ \xrightarrow{} \left[\begin{array}{ccc|c} 1 & 1 & 1 & 6 \\ 0 & 2 & 0 & 4 \\ 0 & 6 & -3 & 3 \end{array}\right] \]
Step 2: Clear Column 2 (below pivot) \(R_3 \leftarrow R_3 - 3R_2\) \[ \xrightarrow{} \left[\begin{array}{ccc|c} 1 & 1 & 1 & 6 \\ 0 & 2 & 0 & 4 \\ 0 & 0 & -3 & -9 \end{array}\right] \]
Back Substitution: \(z=3 \implies y=2 \implies x=1\)
Computing Inverse via Gaussian Elimination
Core Idea: Augment \(A\) with \(I\), row reduce until \(A \to I\). Then right side is \(A^{-1}\). \[ [A | I] \xrightarrow{\text{RREF}} [I | A^{-1}] \]
1. Setup \([A|I]\)
\[ \left[\begin{array}{cc|cc} 1 & 2 & 1 & 0 \\ 3 & 4 & 0 & 1 \end{array}\right] \]
2. Eliminate
\(R_2 \leftarrow R_2 - 3R_1\)
\[ \left[\begin{array}{cc|cc} 1 & 2 & 1 & 0 \\ 0 & -2 & -3 & 1 \end{array}\right] \]
3. Solve & Normalize
\(R_1, R_2\) ops
\[ \left[\begin{array}{cc|cc} 1 & 0 & -2 & 1 \\ 0 & 1 & 1.5 & -0.5 \end{array}\right] \]
Result: \(A^{-1} = \begin{pmatrix} -2 & 1 \\ 1.5 & -0.5 \end{pmatrix}\)
Exercise: 3x3 Inverse
Compute the inverse of \(A = \begin{pmatrix} 1 & 0 & 2 \\ 2 & -1 & 3 \\ 4 & 1 & 8 \end{pmatrix}\)
1. Setup Augmented Matrix: \[ [A|I] = \left[\begin{array}{ccc|ccc} 1 & 0 & 2 & 1 & 0 & 0 \\ 2 & -1 & 3 & 0 & 1 & 0 \\ 4 & 1 & 8 & 0 & 0 & 1 \end{array}\right] \]
2. Row Reduce (\(A \to I\)): - Elim Col 1: \(R_2-2R_1\), \(R_3-4R_1\) - Elim Col 2: \(R_3+R_2\) - Normalize & Back-Sub
Answer: \(A^{-1} = \begin{pmatrix} -11 & 2 & 2 \\ -4 & 0 & 1 \\ 6 & -1 & -1 \end{pmatrix}\)
Exercise: Solving Linear Systems
Solve the system: \(\begin{cases} 3x + 2y = 12 \\ x + 4y = 10 \end{cases}\)
Answer: \(\begin{pmatrix} 3 & 2 \\ 1 & 4 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} 12 \\ 10 \end{pmatrix}\)
Answer: \(\det(A) = 3(4) - 2(1) = 10 \neq 0\) → Yes, unique solution!
Answer: \(A^{-1} = \frac{1}{10}\begin{pmatrix} 4 & -2 \\ -1 & 3 \end{pmatrix}\) → \(\mathbf{x} = \begin{pmatrix} 2.8 \\ 1.8 \end{pmatrix}\)
Solving Linear Systems in NumPy
import numpy as np
#> Define the system: Ax = b
A = np.array([[2, 1],
[1, 3]])
b = np.array([5, 7])
#> Method 1: Using solve (RECOMMENDED)
x = np.linalg.solve(A, b)
print(f"Solution: x = {x}")
#> Verify: A @ x should equal b
print(f"Verification: A @ x = {A @ x}")
#> Method 2: Using inverse (NOT recommended)
x_inv = np.linalg.inv(A) @ b
print(f"Via inverse: x = {x_inv}")Solution: x = [1.6 1.8]
Verification: A @ x = [5. 7.]
Via inverse: x = [1.6 1.8]Always use np.linalg.solve(A, b) — it’s faster and more accurate!
Thank You!


![]()
The University of Alabama