CS-466/566: Math for AI
Module 01: The Geometry of Data
2026-03-23
Mathematical Foundations of AI/ML
The Language of Data The mathematics of machine learning rests upon three pillars: linear algebra, calculus, and probability theory.
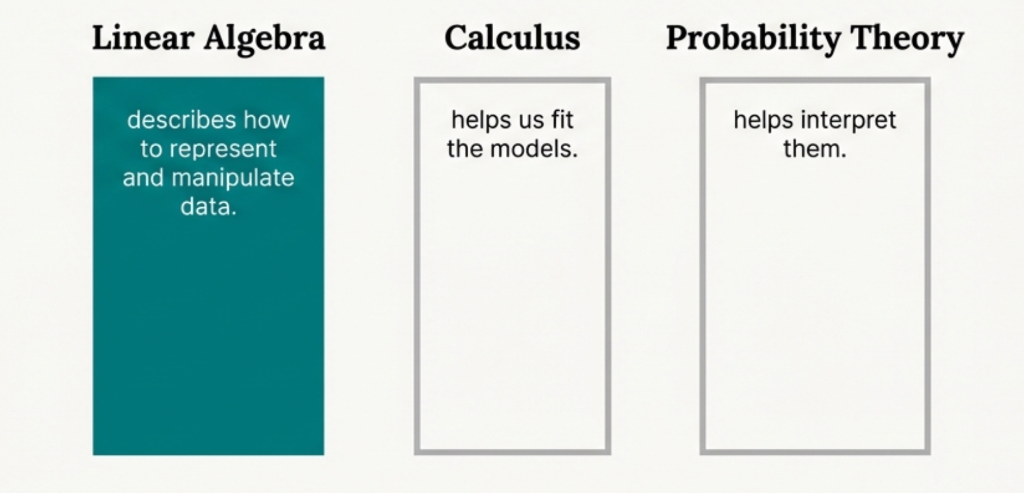
We will start at the beginning: representing and manipulating data.
The Iris Dataset
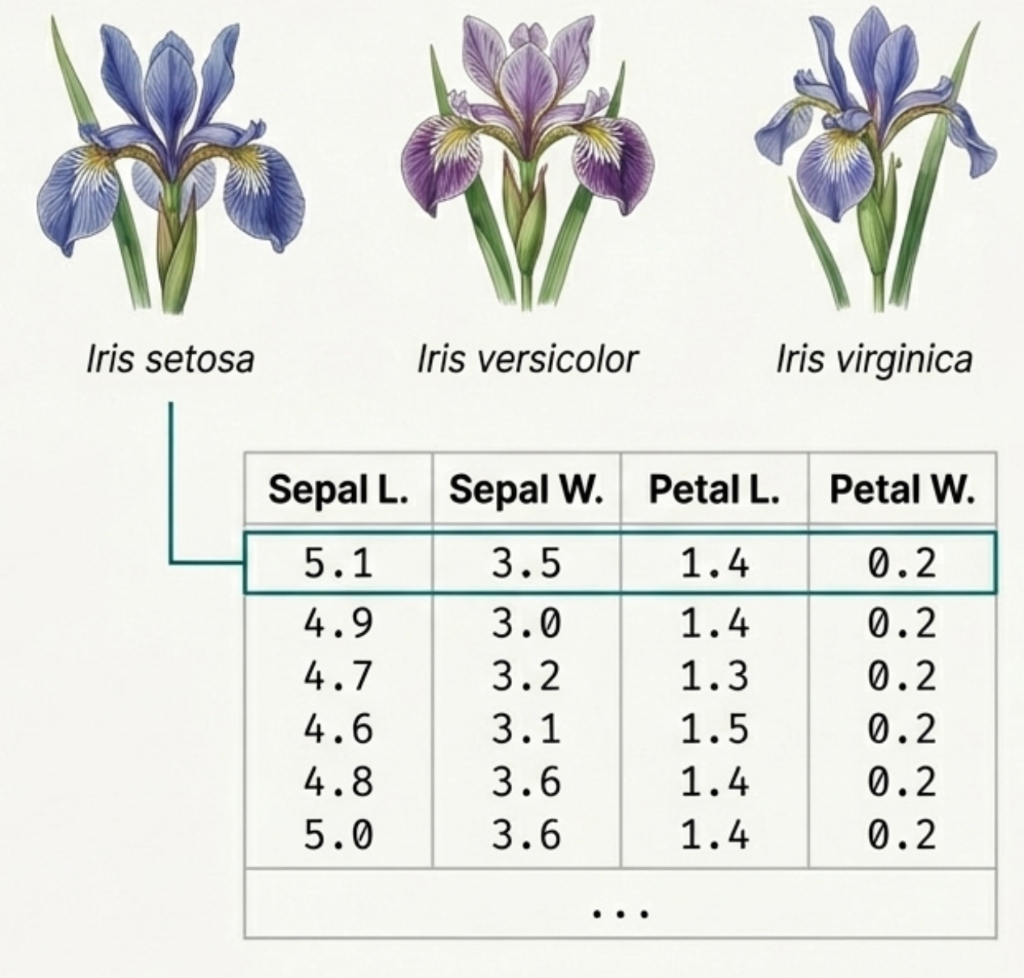
To guide our journey, we will use the famous Iris dataset. It contains measurements from three species of Iris flower.
Each data point (a sample) includes four measurements: sepal length, sepal width, petal length, and petal width.
- Iris setosa
- Iris versicolor
- Iris virginica
Each measurement type is a feature. The dataset contains 150 samples and 4 features.
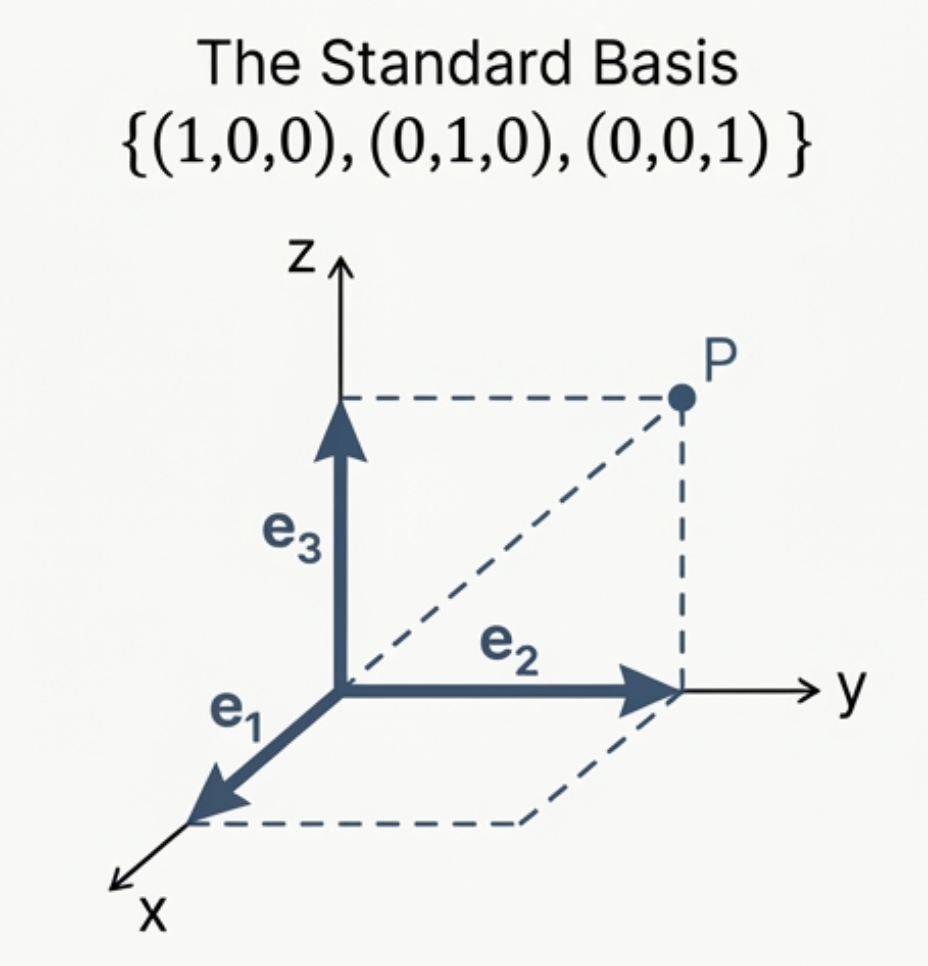
Basis Vectors & Coordinates
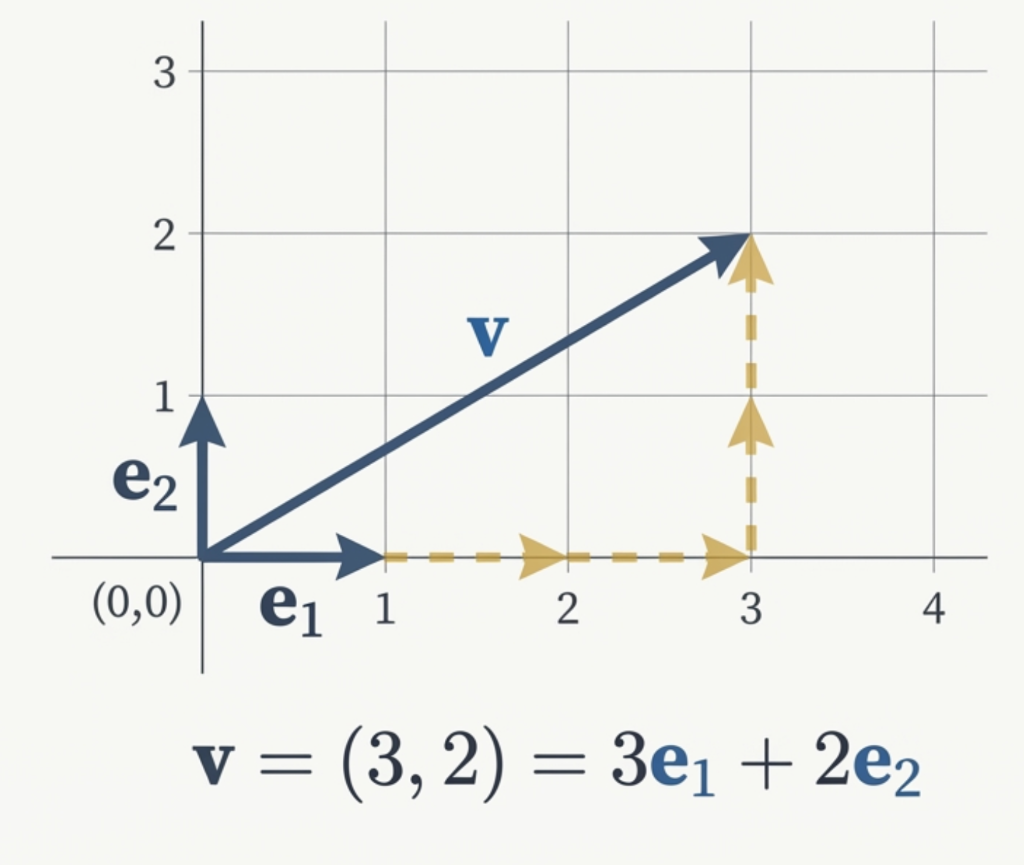
We represent the vector \(\mathbf{v}\) with the coordinate pair \((3, 2)\).
This is shorthand for saying we take 3 steps along the first axis and 2 steps along the second.
These “steps” are defined by a special set of vectors: \(\mathbf{e}_1\) and \(\mathbf{e}_2\).
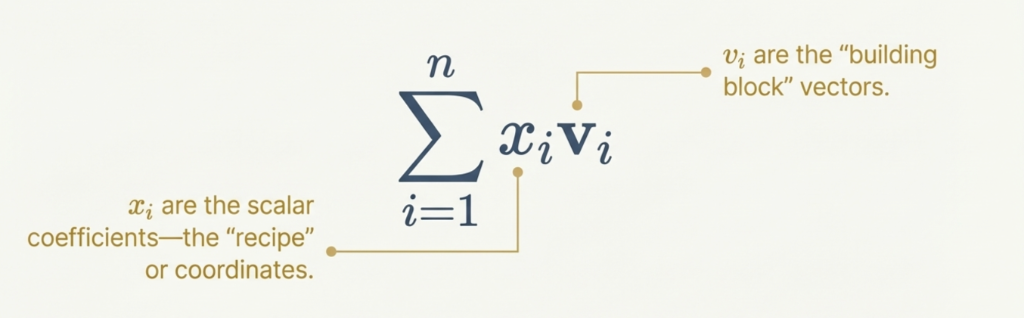
Linear Combinations
Coordinates are simply the instructions - the recipe - for building a vector using a pre-agreed set of “building block” vectors.
This recipe is called a linear combination.
The same vector can have different coordinates if we change the building blocks.
Our mission is to understand what makes a good set of building blocks.
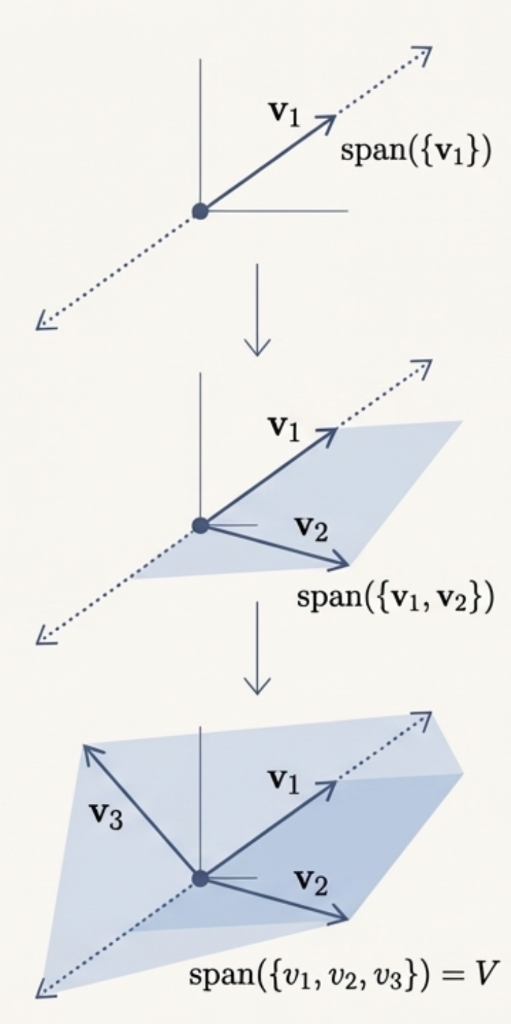
The Span
For a set of vectors \(S = \{\mathbf{u}, \mathbf{v}\}\), its span is the set of all possible linear combinations of those vectors.
If \(\text{span}(S) = V\), we say \(S\) is a generating set for the vector space \(V\).
Defining the Basis
The ideal ‘skeleton’ for a vector space must have maximum reach and zero redundancy. This perfect set is called a basis.
The Definition of Magnitude
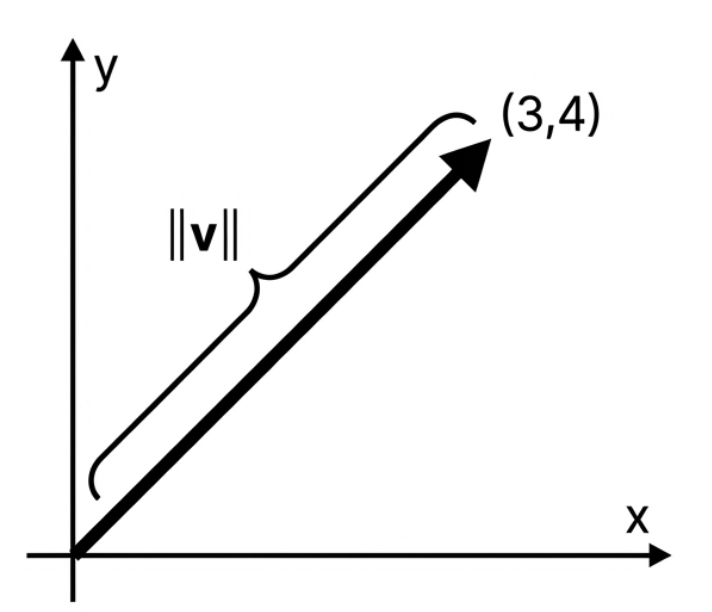
Definition: In vector space, a Norm is the function that assigns a strictly positive length or size to a vector.
Common Norms
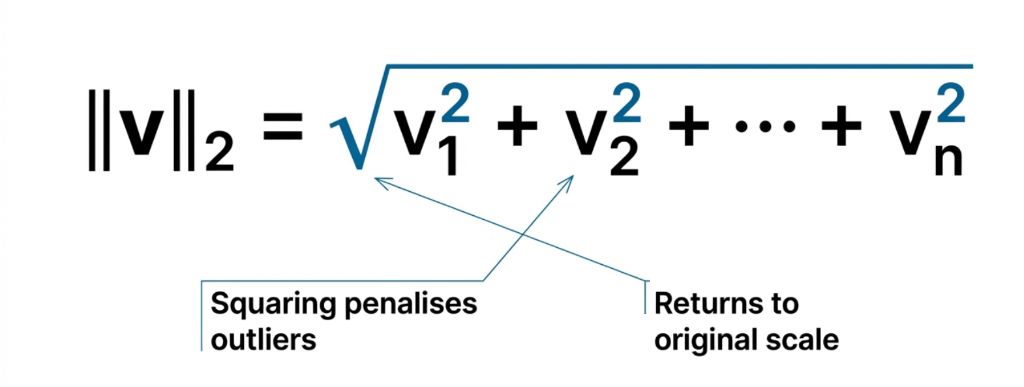
\(L^2\) (Euclidean) – Most common in ML
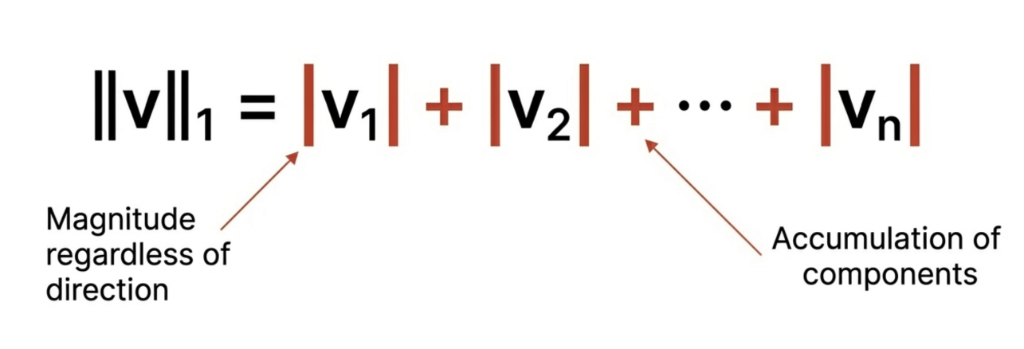
\(L^1\) (Manhattan) – Used in regularization
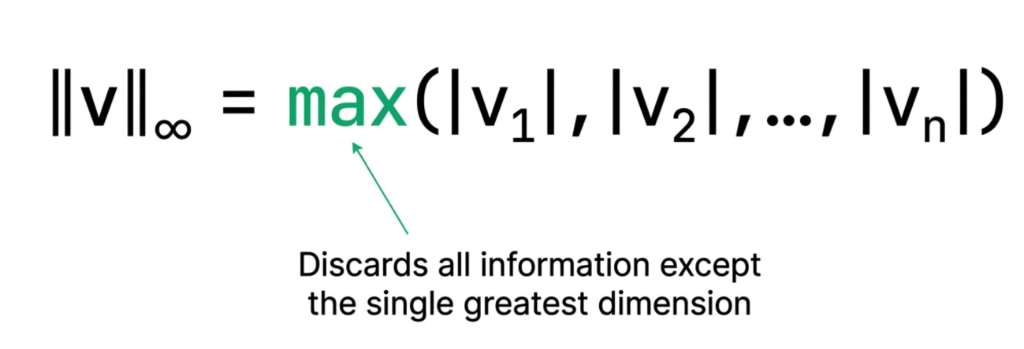
\(L^\infty\) (Max) – Largest component
Vectorization: Visual Comparison
- Vectorization is the process of converting a loop-based algorithm into a vector-based algorithm.
- GPUs are designed to perform vectorized operations.

Thank You!